
Page 73 - 202003期
P. 73
The Management of underground pipelineanagement of underground pipeline
The M
RTC360进行地铁隧道信息采集,通过对点云 利用RTC360进行外业扫描理论上不需
数据坐标转换、拼接、去噪、裁切和抽稀等预 要已知控制点,仪器内部设有视觉追踪装置,
处理,利用自主研发的隧道点云处理软件自动 独有的VIS视觉追踪技术,可以实时跟踪计算
提取任意里程指定位置的限界数据并一键报 两个连续测站间的相对位置,实时的进行预
表生产,真实展现地铁隧道的空间形态。以青 拼接,得到的是相对位置的点云。但在以后的
岛地铁1号线过海段为例,验证了此方法在地 限界分析中需要得到里程、坐标、高程等绝对
铁限界测量分析的可行性和优势,此方法相比 位置数据,因而需要将已知点假设标靶,将标
传统全站仪测量方式效率有了极大提高,且完 靶扫入隧道点云中,用于内业坐标转换获取绝
全能够满足设计院限界分析数据格式要求。 对点云。地铁隧道间隔一定距离已经布设有地
下控制点,在外业扫描前要对地下控制点进行
2 数据采集及点云预处理
现场复核,确保控制点没有破坏、准确无误。
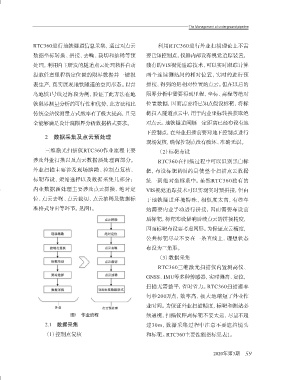
三维激光扫描仪RTC360作业流程主要 (2)标靶布设
涉及外业扫描以及点云数据预处理两部分。 RTC360在扫描过程中可以识别黑白标
外业扫描主要涉及现场踏勘、控制点复核、 靶,布设标靶的目的是使整个扫描点云数据
标靶布设、架站选择以及数据采集几部分; 统一到绝对坐标系中。虽然RTC360独有的
内业数据预处理主要涉及点云拼接、绝对定 VIS视觉追踪技术可以实现实时预拼接,但由
位、点云去噪、点云裁切、点云抽稀及数据标 于地铁隧道环境特殊,相似度太高,有些车
准格式导出等环节。见图1。 站需要内业手动进行拼接,因而需要布设前
后标靶,标靶布设影响后续点云的拼接精度,
因而标靶布设要考虑网形。为保证点云精度,
公共标靶尽量不要在一条直线上,理想状态
布设为三角形。
(3)数据采集
RTC360三维激光扫描仪内置测高仪、
GNSS、IMU等多种传感器,实时测高、定位,
扫描无需整平,省时省力。RTC360扫描速率
每秒200万点,效率高,极大地缩短了外业作
业时间。为保证外业扫描精度,标靶和测站必
图1 作业流程 须通视,扫描仪距离标靶不要太远,尽量不超
2.1 数据采集 过30m,数据采集过程中注意不要遮挡镜头
(1)控制点复核 和标靶。RTC360主要性能指标见表1。
2020年第3期 59