
Page 19 - 202006期
P. 19
The Management of underground pipeline
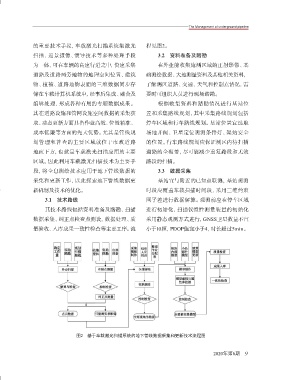
的重要技术手段,车载激光扫描系统集激光 程见图2。
扫描、近景摄像、惯导技术等多种处理手段 3.2 资料准备及踏勘
为一体,可在车辆的高速行进之中,快速采集 在外业前收集施测区域的正射影像、基
道路及道路两旁地物的地理空间位置、建筑 础测绘数据、大地测量资料及其他相关资料,
物、植被、道路地物表面的三维数据同步存 了解测区道路、交通、天气和控制点情况,需
储在车载计算机系统中,经事后集成、融合及 要时可组织人员进行现场踏勘。
编辑处理,形成各种有用的专题数据成果。 根据收集资料和踏勘情况进行基站位
其在道路设施和管网设施空间数据的采集获 置和采集路线规划,其中采集路线规划包括
取、动态更新方面具备作业高效、位置精准、 停车区域和行车路线规划。基站位置宜选取
成本低廉等方面的先天优势。尤其是管线规 场地开阔、卫星定位观测条件好、架站安全
划管理和普查的主要区域就位于市政道路 的位置。行车路线规划应保证测区内待扫描
地面下方,也就是车载激光扫描应用的主要 道路的全覆盖,尽可能减少重复路段和无效
区域。因此利用车载激光扫描技术为主要手 路段的扫描。
段,将全息测绘技术应用于地下管线数据的 3.3 数据采集
采集和更新工作,以此探索地下管线数据更 基站宜与附近的已知点联测,基站观测
新机制及技术的优化。 时段应覆盖车载扫描时间段,采用三维约束
3.1 技术路线 网平差进行数据解算。观测前应在停车区域
其技术路线包括资料准备及踏勘、扫描 进行初始化,扫描仪惯性测量装置的初始化
数据采集、纠正点检查点测设、数据处理、质 采用静态观测方式进行,GNSS卫星数量不宜
量验收、入库成果一致性检查等主要工序。流 小于10颗,PDOP值宜小于4,时长超过5min。
图2 基于车载激光扫描系统的地下管线数据采集和更新技术流程图
2020年第6期 9