
Page 68 - 2020管线1期印刷文件+(1)
P. 68
应用技术
单位竣工验收中对位置及深度的精度要求。 度数据,管道的轨迹是直线时,左右方向的
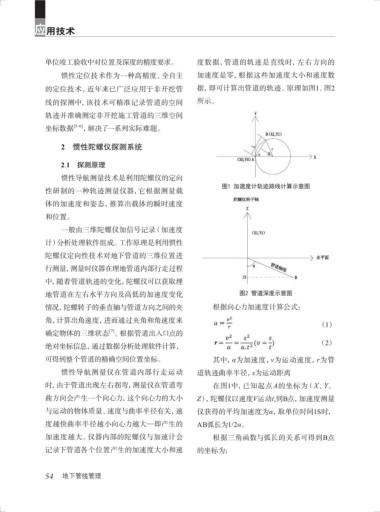
惯性定位技术作为一种高精度、全自主 加速度是零,根据这些加速度大小和速度数
的定位技术,近年来已广泛应用于非开挖管 据,即可计算出管道的轨迹。原理如图1、图2
线的探测中,该技术可精准记录管道的空间 所示。
轨迹并准确测定非开挖施工管道的三维空间
坐标数据 [5-6] ,解决了一系列实际难题。
2 惯性陀螺仪探测系统
2.1 探测原理
惯性导航测量技术是利用陀螺仪的定向
图1 加速度计轨迹路线计算示意图
性研制的一种轨迹测量仪器,它根据测量载
体的加速度和姿态,推算出载体的瞬时速度
和位置。
一般由三维陀螺仪加信号记录(加速度
计)分析处理软件组成。工作原理是利用惯性
陀螺仪定向性技术对地下管道的三维位置进
行测量,测量时仪器在埋地管道内部行走过程
中,随着管道轨迹的变化,陀螺仪可以获取埋
地管道在左右水平方向及高低的加速度变化 图2 管道深度示意图
情况,陀螺转子的垂直轴与管道方向之间的夹 根据向心力加速度计算公式:
角,计算出角速度,进而通过夹角和角速度来
(1)
[7]
确定物体的三维状态 。根据管道出入口点的
(2)
绝对坐标信息,通过数据分析处理软件计算,
可得到整个管道的精确空间位置坐标。 其中, α为加速度, v为运动速度, r为管
惯性导航测量仪在管道内部行走运动 道轨迹曲率半径, s为运动距离
时,由于管道出现左右拐弯,测量仪在管道弯 在图1中,已知起点A的坐标为(X、 Y、
曲方向会产生一个向心力,这个向心力的大小 Z),陀螺仪以速度V运动t 到B点,加速度测量
s
与运动的物体质量、速度与曲率半径有关,速 仪获得的平均加速度为α,取单位时间1S时,
度越快曲率半径越小向心力越大—即产生的 AB弧长为1/2α。
加速度越大。仪器内部的陀螺仪与加速计会 根据三角函数与弧长的关系可得到B点
记录下管道各个位置产生的加速度大小和速 的坐标为:
54 地下管线管理