
Page 17 - 202005期
P. 17
The Management of underground pipeline
指定工程坐标系下。坐标系统的定义及转换 2.4.2 点云数据抽稀
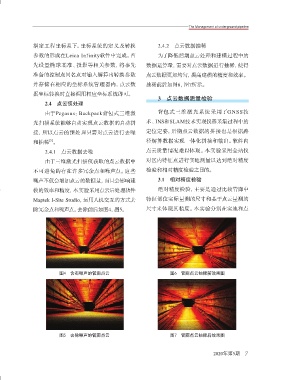
参数的形成在Leica Infinity软件中完成。首 为了降低后期点云处理和建模过程中的
先设置椭球基准、投影等相关参数,将事先 数据运算量,需要对点云数据进行抽稀,使得
准备的控制点同名点对输入解算出转换参数 点云数据更加均匀,提高建模的精度和效率。
并存储在相应的坐标系统管理器内,点云数 抽稀前后如图6,图7所示。
据坐标转换时直接调用相应坐标系统即可。
3 点云数据质量检验
2.4 点云预处理
由于Pegasus:Backpack背包式三维激 背包式三维激光系统采用了GNSS技
光扫描系统能够自动实现点云数据的自动拼 术、INS和SLAM技术实现仪器采集过程中的
接,所以点云的预处理只需对点云进行去噪 定位定姿,后期点云数据的拼接也是根据路
[5]
和抽稀 。 径解算数据实现一体化拼接和输出。软件内
2.4.1 点云数据去噪 点云质量情况难以体现。本实验采用全站仪
由于三维激光扫描仪获取的点云数据中 对区内特征点进行实地测量以达到绝对精度
不可避免的存在许多冗余点和噪声点。这些 检验和相对精度检验之目的。
噪声不仅会增加点云的数据量,而且会影响建 3.1 相对精度检验
模的效率和精度,本实验采用点云后处理软件 绝对精度检验,主要是通过比较管廊中
Maptek I-Site Studio,运用人机交互的方式去 特征部位实际量测的尺寸和基于点云量测的
除冗余点和噪声点。去除前后如图4,图5。 尺寸来体现其精度。本实验分别在实地和点
图4 含有噪声的管廊点云 图6 管廊点云抽稀前效果图
图5 去除噪声的管廊点云 图7 管廊点云抽稀后效果图
2020年第5期 7