
Page 54 - 202006期
P. 54
应用技术
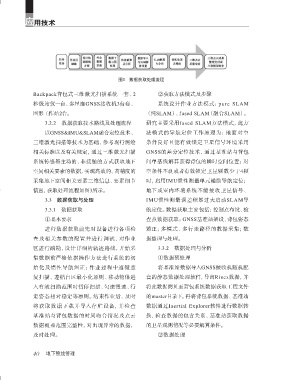
图3 数据获取处理流程
Backpack背包式三维激光扫描系统一套、2 ②获取方法模式及步骤
秒级站仪一台、多星座GNSS接收机3台套、 系统设计作业方法模式:pure SLAM
图形工作站2台。 (纯SLAM)、fused SLAM(融合SLAM)。
3.2.2 数据获取技术路线及处理流程 研究主要采用fused SLAM方法模式,此方
以GNSS&IMU&SLAM融合定位技术、 法模式的导航定位工作原理为:地面对空
三维激光扫描等技术为基础,参考现行测绘 条件良好且能有效锁定卫星信号环境采用
相关标准以及有关规定,通过三维激光扫描 GNSS的差分定位技术,通过基准站与背包
系统传感器主动的、非接触的方式获取地下 间单基线解算获得背包的瞬时空间位置;对
空间相关要素的数据,实现高效的、高精度的 空条件不良或者有效锁定卫星颗数少于4颗
采集地下空间相关要素三维信息、要素细节 时,启用IMU惯性测量单元辅助导航定位;
信息,获取处理流程如图3所示。 地下或室内环境系统不能接收卫星信号、
3.3 数据获取与处理 IMU惯性测量误差积累过大启动SLAM导
3.3.1 数据获取 航定位。数据获取主要包括:控制点布设、检
①基本要求 查点数据获取;GNSS基准站架设、背包姿态
进行数据获取前先对设备进行各项检 矫正;多模式、多行走路径的数据采集;数
查及相关参数的配置并进行调试,对作业 据整理与处理。
区进行踏勘,设计详细的轨迹路线,开始采 3.3.2 数据处理与分析
集数据前严格依据操作方法进行系统的初 ①数据预处理
始化及惯性导航纠正;作业过程中遵循重 将基准站数据导入GNSS接收机随机配
复扫描、遵循盲区最小化原则、移动物体进 套的静态数据处理软件,导出Rinex数据,并
入有效扫描范围时暂停扫描、匀速慢速、行 将此数据拷贝至背包系统数据获取工程文件
走姿态相对稳定等原则。结束作业后,及时 的master目录下。再将背包系统数据、基准站
将获取数据下载并导入存贮设备,并检查 数据通过Inertial Explorer软件进行数据转
基准站与背包数据的时间吻合情况及点云 换,检查数据的包含关系、基准站获取数据
数据覆盖范围完整性,对出现异常的数据, 的卫星观测情况等必要解算条件。
及时处理。 ②数据处理
40 地下管线管理