
Page 55 - 202006期
P. 55
The Management of underground pipelineanagement of underground pipeline
The M
主要包括:轨迹解算、数据导入及处理 作业模式及方法逐一进行了数据获取及研
参数设置、SLAM解算、点云及全景照片生 究分析。
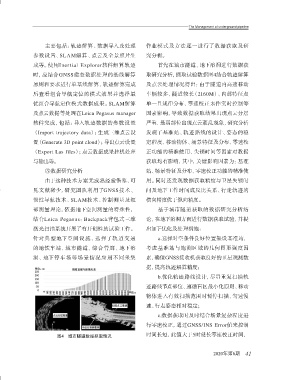
成等。使用Inertial Explorer软件解算轨迹 首先在城市隧道、地下溶洞进行数据获
时,应结合GNSS建态数据处理的基线解算 取研究分析,摘取试验数据图4结合轨迹解算
原则和要求进行单基线解算,轨迹解算完成 及点云处理情况得出:由于隧道内高速移动
后查看组合导航定位的模式效果并选择最 车辆较多、隧道较长(2160M)、内部特征点
优组合导航定位模式数据成果。SLAM解算 单一且规律分布、零速校正未作实时控制等
及点云数据等处理在Leica Pegasus manager 因素影响,导致数据获取结果出现点云分层
软件完成,包括:导入轨迹数据的参数设置 严重、最弱部位出现点云紊乱现象,研究分析
(Import trajectory data);生成三维点云设 发现了基准站、轨迹路线的设计、姿态的稳
置(Generate 3D point cloud);导出点云设置 定程度、移动物体、场景特征及分布、零速校
(Export Las files);点云数据成果挂机处理 正功能的精准使用、失锁时间等因素对数据
与输出等。 获取均有影响,其中,关键影响因素为:基准
③数据研究分析 站、场景特征及分布、零速校正功能的精准使
由于这种技术方案无成熟经验借鉴、可 用。同时还发现数据获取精度与卫星失锁时
见文献稀少,研究团队利用了GNSS技术、 间及地下工作时间成反比关系、行走轨迹的
惯性导航技术、SLAM技术、控制测量及细 横向精度优于纵向精度。
部测量理论,依据地下空间测量的特殊性, 基于城市隧道获取的数据研究分析结
结合Leica Pegasus:Backpack背包式三维 论,在地下溶洞方面进行数据获取试验,并提
激光扫描系统开展了有开创性的试验工作。 出如下优化及处理措施:
针对典型地下空间设施,选择了轨道交通 a.选择对空条件良好位置架设基准站,
的地铁车站、城市隧道、综合管廊、地下溶 考虑基准站与施测区域的几何图形强度因
洞、地下停车场等场景情况应用不同采集 素,确保GNSS接收机获取良好的卫星观测数
据,提高轨迹解算精度;
b.优化轨迹路线设计,尽量重复扫描轨
迹路线节点部位、遵循盲区最小化原则、移动
物体进入有效扫描范围时暂停扫描、匀速慢
速、行走姿态相对稳定;
c.数据获取时及时结合场景复杂程度进
行零速校正,通过GNSS/INS Error值来控制
图4 城市隧道数据获取情况 时间长短,此值大于5时延长零速校正时间,
2020年第6期 41