
Page 53 - 202004期
P. 53
The M
The Management of underground pipelineanagement of underground pipeline
式,将人力从繁重的重复劳动中解放出来,工 综合性、实用性和先进性角度出发,系统主
作效率显著提升,尤其在城市道路病害检测、 要由承载分系统、定位分系统、成像分系统、
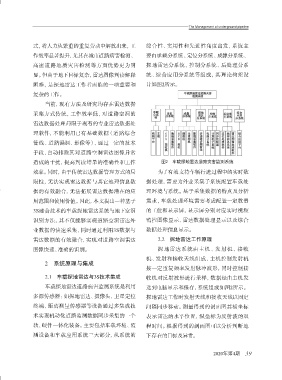
高速道路地质灾害检测等方面优势更为明 探地雷达分系统、控制分系统、后处理分系
显。但由于地下目标复杂,雷达图像判读解释 统、综合应用分系统等组成,其理论构架设
困难,是探地雷达工作者面临的一项重要和 计如图2所示。
复杂的工作。
当前,现有方法及研究均存在雷达数据
采集方式传统,工作效率低,对道路空洞的
雷达数据处理局限于现有的专业雷达数据处
理软件,不能利用已有基础数据(道路综合
管线、道路涵洞、影像等),通过一定的技术
手段,自动排除其对道路空洞雷达图像异常
造成的干扰,提高判读结果的准确性和工作 图2 车载探地雷达道路灾害监测系统
效率。同时,由于传统雷达数据管理方式的局 为了有效支持车辆行进过程中的实时数
限性,无法实现雷达数据与其它地理信息数 据处理,需要为外业采集子系统配置车载处
据的有效融合,无法拓展雷达数据潜在的应 理环境与系统。基于采集数据的特点及分析
用范围和使用价值。因此,本文提出一种基于 需求,车载处理环境需要考虑配置一定数量
3S融合技术的车载探地雷达系统与地下空洞 的工位和显示屏,显示屏分别对应实时视频
识别方法,其不仅能够实现道路空洞雷达外 监控图像显示、雷达数据处理显示以及综合
业数据的快速采集,同时通过利用3S数据与 数据处理信息显示。
雷达数据的有效融合,实现对道路空洞雷达 2.2 探地雷达工作原理
图像快速、准确的识别。 探 地雷达系统由主机、发射机、接收
机、发射和接收天线组成,主机控制发射机
2 系统原理与集成
按一定重复频率发射脉冲波形,同时控制接
2.1 车载探地雷达与3S技术集成 收机对反射波形进行采样,数据经由主机发
车载探地雷达道路病害监测系统是利用 送到电脑显示和保存,系统组成如图2所示。
多源传感器:如探地雷达、摄像头、卫星定位 探地雷达工作时发射天线和接收天线以固定
终端、距离测量传感器等设备通过多集成技 间隔同步移动。测量得到的剖面图其横坐标
术实现机动化道路监测数据同步采集的一个 表示雷达的水平位置,纵坐标为反射波的双
软、硬件一体化装备。主要包括车载环境、监 程时间。根据得到的剖面图可以分析判断地
测设备和车载应用系统三大部分,从系统的 下存在的目标及异常。
2020年第4期 39