
Page 54 - 202004期
P. 54
应用技术
直角坐标,坐标单位为米。
理论上,只要已知两点具有WGS-84坐
标及其相对应的地方坐标值,即可通过以上
转换模型实现坐标转换,但实际工作中,至少
需要三个及以上的已知点,多余数据主要用于
对已转换的坐标进行检核和校验。
在车载道路病害检测应用中,GPS定位
图3 探地雷达工作原理图 主要为流动站定位,考虑到使用的便捷性,采
2.3 3S技术 用实时网络RTK技术。网络 RTK根据其解算
1)GPS技术 模式可分为单基站 RTK 技术、虚拟基站技术
GPS技术在车载探地雷达中的应用主要为 (VRS)和主副站技术(MAC),目前大部分
导航定位及实时采集空间信息。对常规的城市 城市都建立了城市台站网,且覆盖面广,使用
道路检测,一般采用WGS-84世界坐标系即可, 便捷,故采用VRS,其精度可以达到厘米级,
但为了使获取的检测数据能够与本地GIS基础 获取数据的精度更高。
信息数据实现快速融合,基于WGS-84的空间 2)RS技术
三维坐标一般要求转换到地方坐标系统。 遥感(RS)技术主要为工作前期和后期
为实现车载雷达在道路灾害检测过程 提供基础影像资料,并在后期雷达图像处理
中获取精确的基于地方坐标系的空间三维坐 及灾害识别中利用RS影像灾害分析特征,对
标,要进行坐标系统转换: 道路灾害识别进行辅助,增加灾害识别的准
GPS默认的坐标系统为WGS-84坐标系。 确性和快速性,并能从RS影像的宏观角度进
实现由世界坐标系转换到地方坐标系有几种 一步梳理灾害成因,为道路地质灾害预判预
方式:三维七参数坐标转换、二维七参数坐标 警提供有效方法。
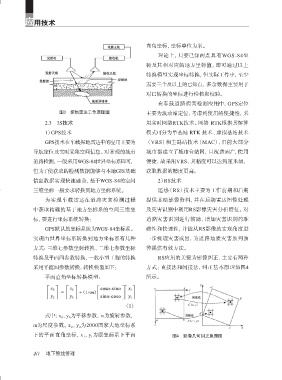
转换及平面四参数转换,一般小型工程的转换 RS应用的关键为影像纠正,主要有两种
采用平面四参数转换,转换模型如下: 方式:直接法和间接法,纠正基本原理如图4
平面直角坐标转换模型: 所示。
(1)
式中:x ,y 为平移参数,α为旋转参数,
0
0
m为尺度参数。x ,y 为2000国家大地坐标系
2
2
下的平面直角坐标,x ,y 为原坐标系下平面 图4 影像几何纠正原理图
1 1
40 地下管线管理