
Page 56 - 202004期
P. 56
应用技术
等。综合3S数据采集过程中的误差(如管线
探测误差、地下设施测量误差等)及雷达探测
过程中GPS测量误差,结合地下设施的特性,
阈值上限经建议设置为20~35cm之间(如,
地下管线的普通井盖直径为70cm,测量一般
以中心为准,因此,将井盖的半径作为阈值上
限值);③对比对成功的坐标值,通过3S数据
库,提取该坐标值对应的地下特征的属性,如
管线埋深、管线材质、管径等基本信息,通过
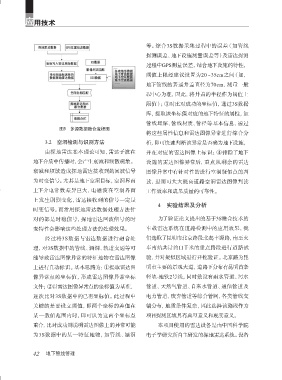
图5 多源数据融合流程图
将这些属性信息和雷达图像异常进行综合分
3.2 空洞检测与识别方法 析,即可快速判断该异常是否确为地下设施,
由探地雷达基本理论可知,雷达子波在 并在对应的雷达图像上标识;④排除了地下
地下介质中传播时,会产生衰减和频散现象。 设施的雷达图像异常后,重点从剩余的雷达
衰减和频散造成探地雷达接收到的回波信号 图像异常中有针对性的进行空洞疑似点的判
为时变信号。尤其是地下空洞目标,空洞界面 读,进而可大大提高道路空洞雷达图像判读
上下介电常数差异巨大,电磁波在空洞界面 工作效率和成果质量的可靠性。
上发生剧烈变化,雷达接收到的信号一定是
4 实验结果及分析
时变信号。而常用探地雷达数据处理方法针
对的都是时稳信号,探地雷达回波信号的时 为了验证论文提出的基于3S融合技术的
变特性会影响这些处理方法的处理效果。 车载雷达系统在道路检测中的应用效果,我
经过将3S数据与雷达数据进行融合处 们选取了昆明市北京路段北起丰源路,南至火
理,对3S数据中的管线、涵洞、轨道交通等可 车南站共计约11千米的重点路段进行道路试
能导致雷达图像异常的特征地物在雷达图像 验,并对疑似区域进行开挖验证。北京路为昆
上进行自动标识。基本思路为:①提取雷达图 明市主要的景观大道,道路下分布有昆明首条
像异常点的坐标值,形成雷达图像异常坐标 轻轨-地铁2号线,同时敷设有雨水管道、污水
文件;②以雷达图像异常点的坐标值为基准, 管道、天然气管道、自来水管道、通信管道及
逐次比对3S数据中的已有坐标值。此过程中 电力管道、废弃管道等综合管网,各类管线交
关键的是要设立阈值,即两个坐标的差值在 错分布,地质条件复杂,因此选择该路段作为
某一数值范围内时,即可认为这两个坐标点 项目探测区域具有典型意义和现实意义。
重合,比对成功则说明雷达图像上的异常可能 本项目使用的雷达设备是由中国科学院
为3S数据中的某一特征地物,如管线、涵洞 电子学研究所自主研发的探地雷达系统。设备
42 地下管线管理